Методические указания по работе с сигналами и системами управления
Программный комплекс для автоматизации моделирования нестационарных процессов в механических системах и системах иной физической природы
Для работы с сигналами и системами управления в ПК Pradis добавлена библиотека Signals, которая работает совместно с библиотекой математики.
Сигнал является узлом с одной степенью свободы типа скорость. Поэтому, когда нужно посмотреть сигнал, ставится индикатор V (рисунок 1).
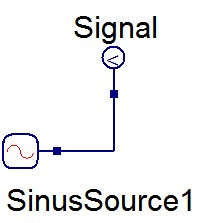
Рисунок 1. Синусоидальный сигнал с индикатором
Для моделей с сигналами обязательно должен быть подключен вход: либо к другой сигнальной модели (рисунок 2), либо на землю (рисунок 3). Выход подключать необязательно

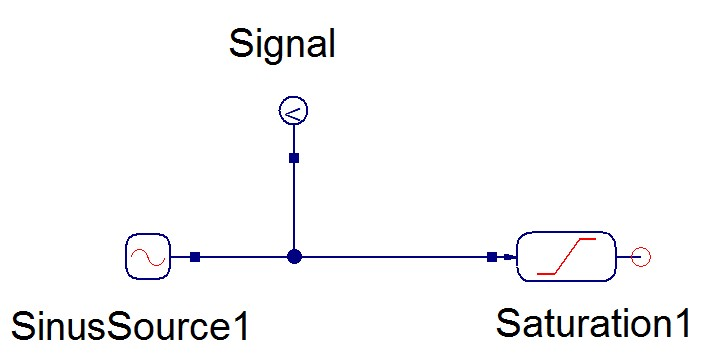
Рисунок 2. Подключение модели сигнала к другой сигнальной модели
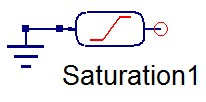
Рисунок 3. Подключение сигнальной модели на землю
Если нужно что-либо сделать с сигналами, то из библиотеки Mathematics нужно выбрать необходимое действие и подключить так, как указано на рисунке 4
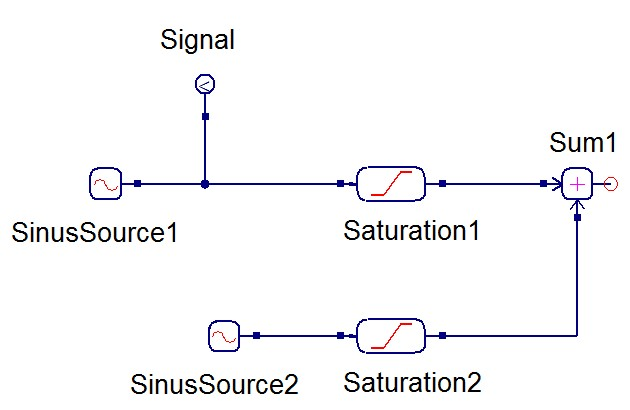
Рисунок 4. Подключение сумматора к сигнальным моделям
Допустимо соединять входы между собой (рисунок 5)
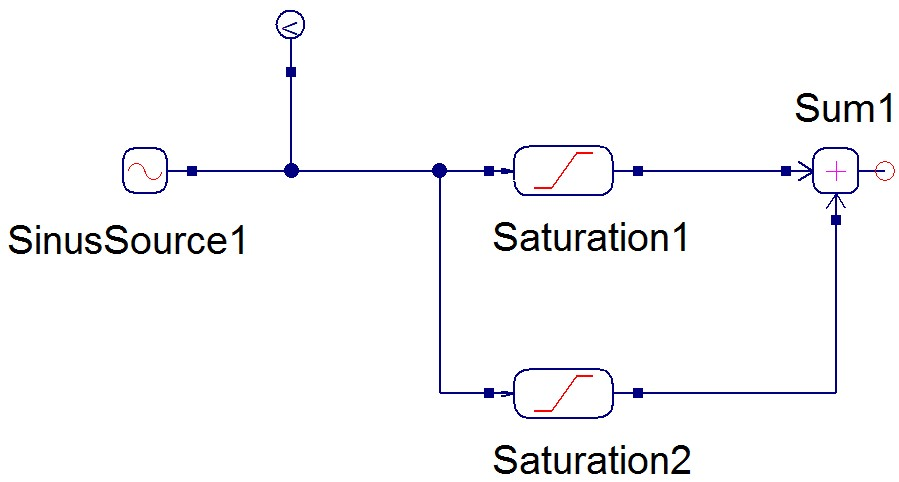
Рисунок 5. Допустимое подключение сигналов
ВАЖНО! Нельзя подключать два выхода параллельно, так как расчеты будут неверные (рисунок 6).

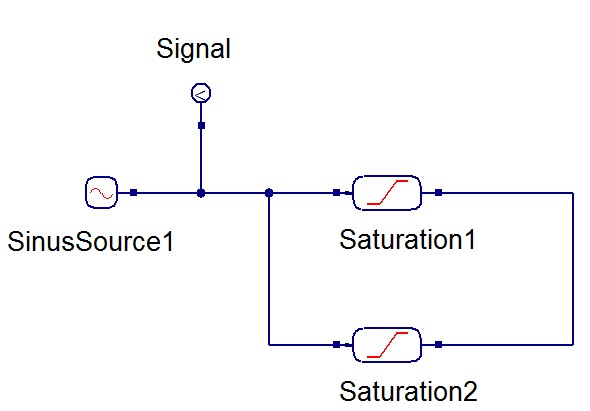
Рисунок 6. Недопустимое подключение выходов
ВАЖНО! Нельзя оставлять неподключенный вход (рисунок 7)
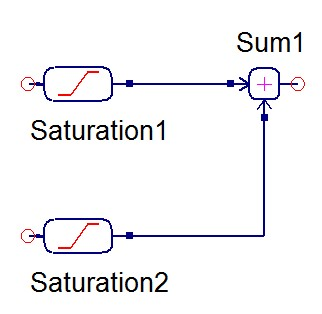
Рисунок 7. Неподключенные входы сигналов
Библиотека Signals состоит из:
Источников:
|
|
|
|
|
|
|
|
|
|
Датчиков, которые генерируют сигналы:
|
|
|
|
|

|
|
|
|
|
Преобразований:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
Рассмотрим примеры. Открываем проект tests DINAMA\examples\tests.
Модели насыщения
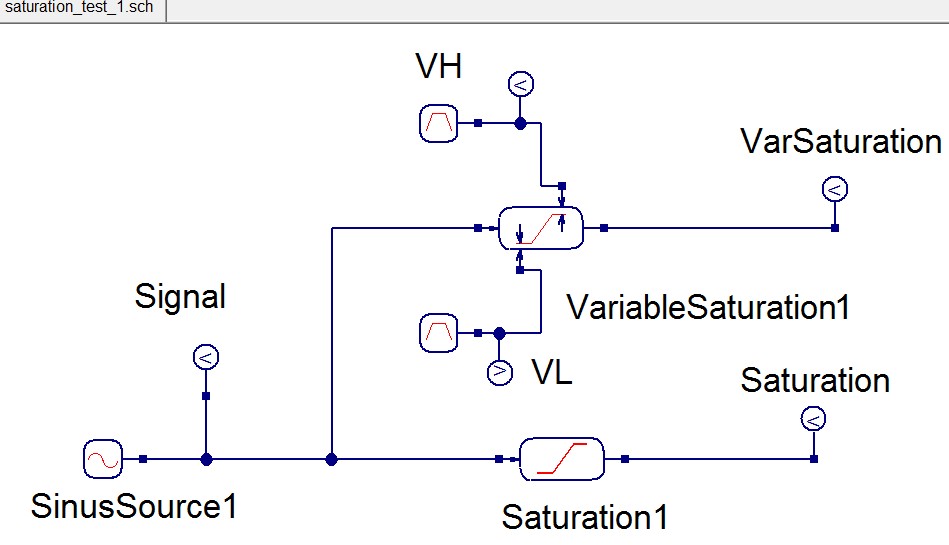
Рисунок 8. Модели насыщения
Синусоидальный источник SinusSource1 выдает синусоиду, модель насыщения Saturation1 по заданным в ней параметрам (1 и -1) срезает синусоиду (рисунок 9)
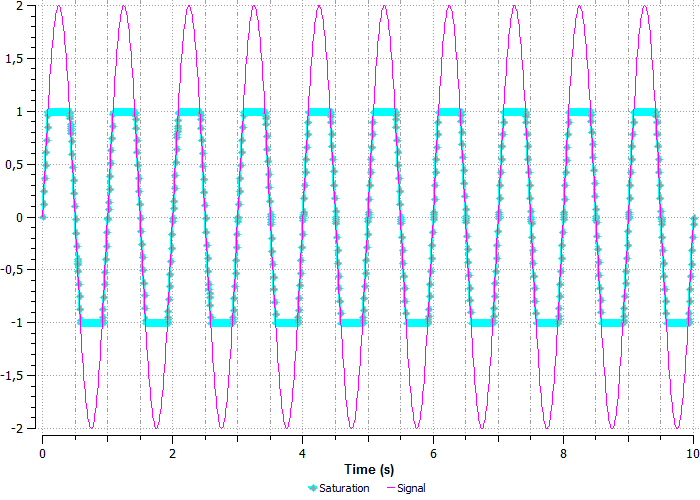
Рисунок 9. График модели насыщения Saturation1
Модель переменного насыщения VariableSaturation1 управляется параметрами VH и VL, которые указывают верхнюю и нижнюю границы, по которым нужно срезать синусоиду (рисунок 10)
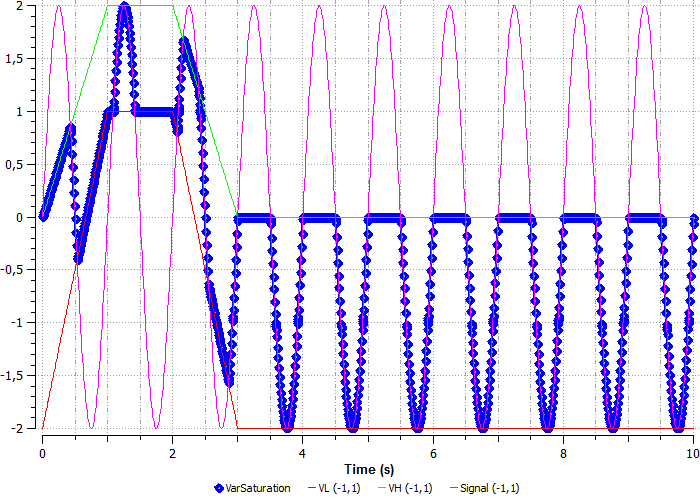
Рисунок 10. График модели переменного насыщения VariableSaturation1
Модели ограничения скорости сигнала
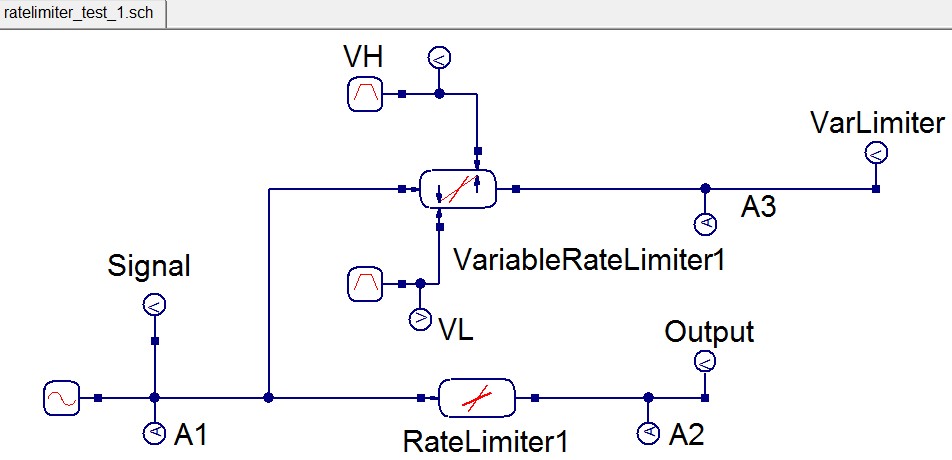
Рисунок 11. Модель ограничения скорости сигнала
Модель RateLimiter1 показывает модель скорости роста синусоиды, заданной источником (рисунок 12)
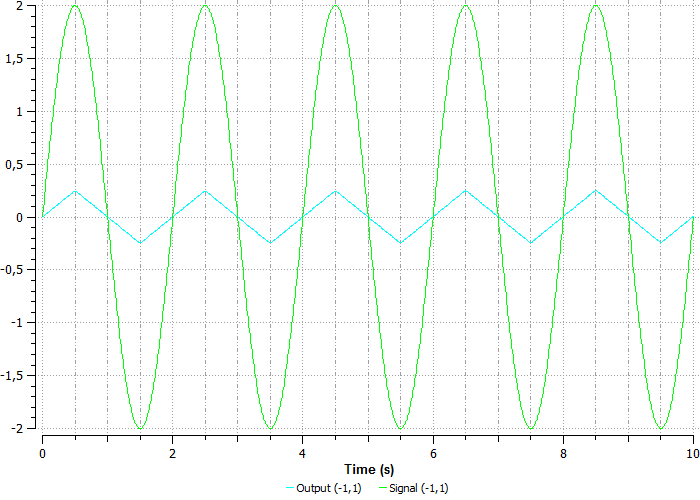
Рисунок 12. График модели скорости роста синусоиды RateLimiter1
Модель VariableRateLimiter1 ограничивает скорость роста синусоиды исходя из значений, заданных параметрами VH и VL, которые указывают верхнюю и нижнюю границы (рисунок 13)
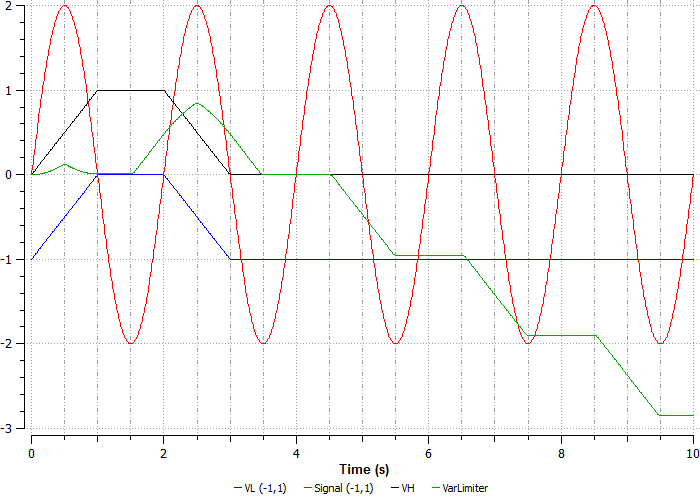
Рисунок 13. График модели переменного ограничения скорости роста синусоиды RateLimiter1
Модели PID регулятора
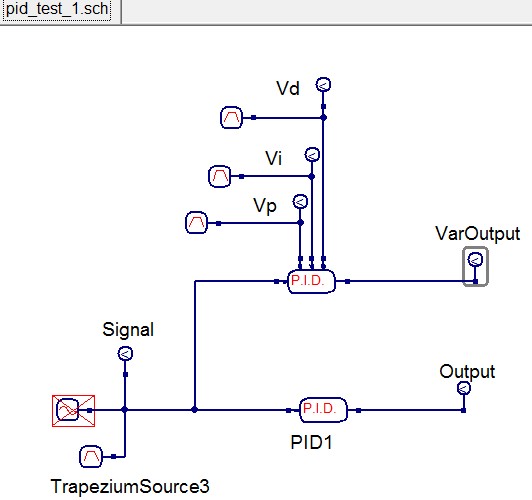
Рисунок 14. Модель PID регулятора
В модели PID1 задаются коэффициенты умножения, дифференцирования и интегрирования (рисунок 15)
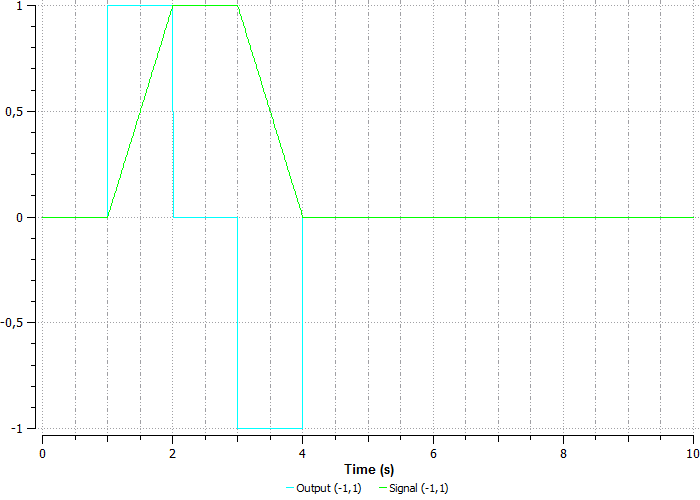
Рисунок 15. График модели PID регулятора
Для переменного PID регулятора значения коэффициентов умножения, дифференцирования и интегрирования задаются через входы Vp, Vd и Vi (рисунок 16)
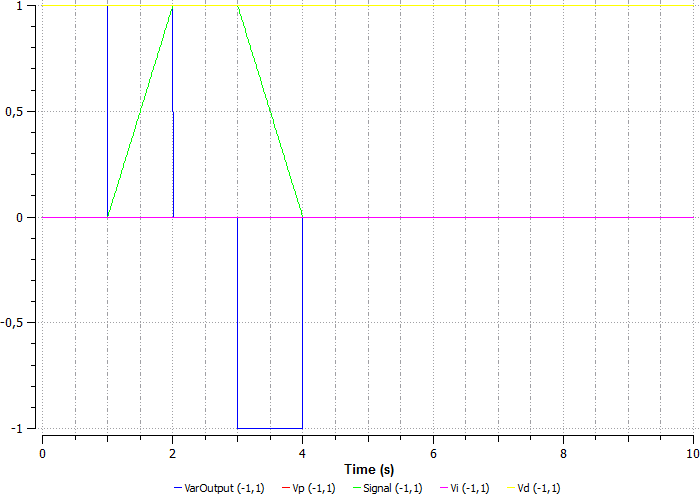
Рисунок 16. График модели переменного PID регулятора
Модели передаточных функций
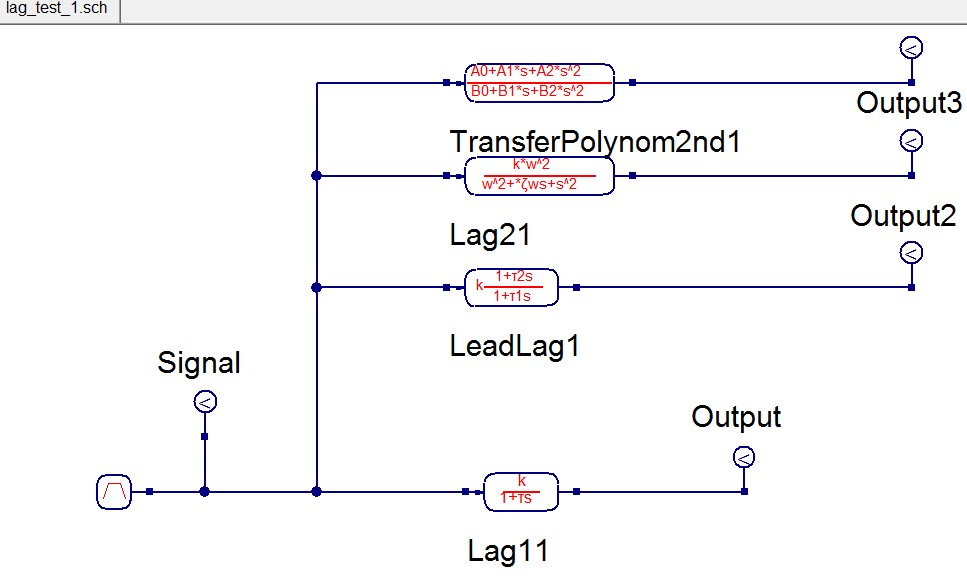
Рисунок 17. Модели передаточных функций.
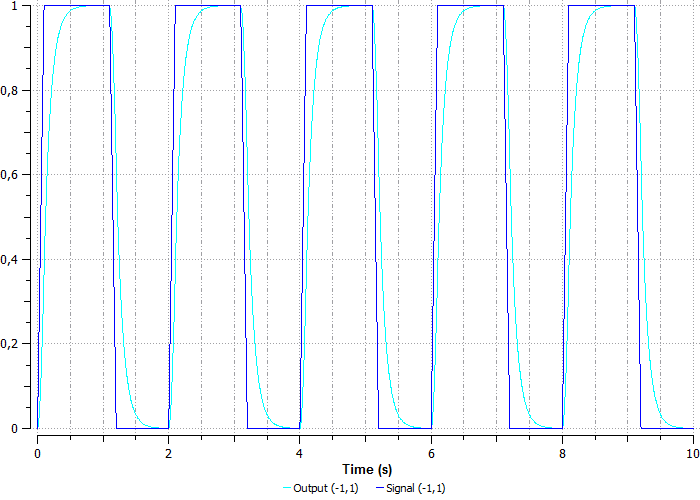
Рисунок 18. График апериодического звена Lag11
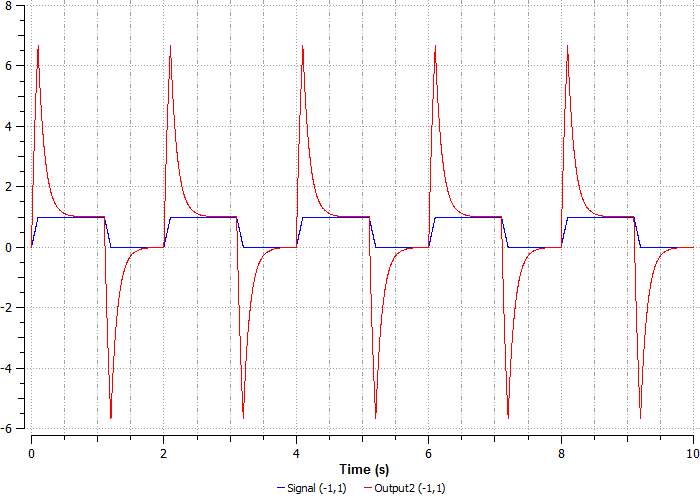
Рисунок 19. График дифференцирующего звена LeadLag1
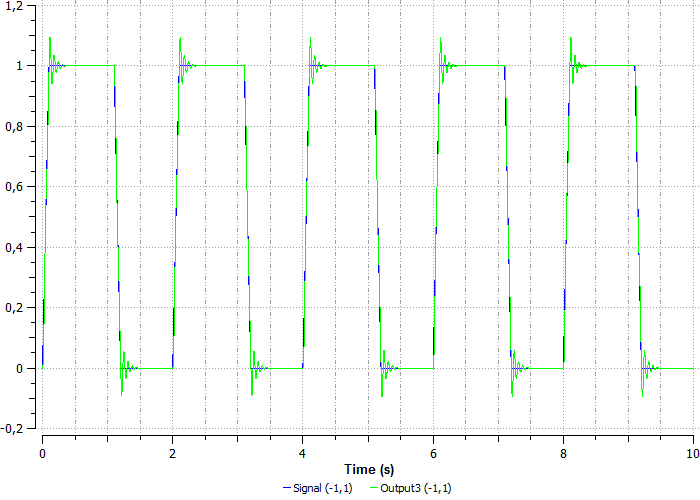
Рисунок 20. График колебательного звена Lag21
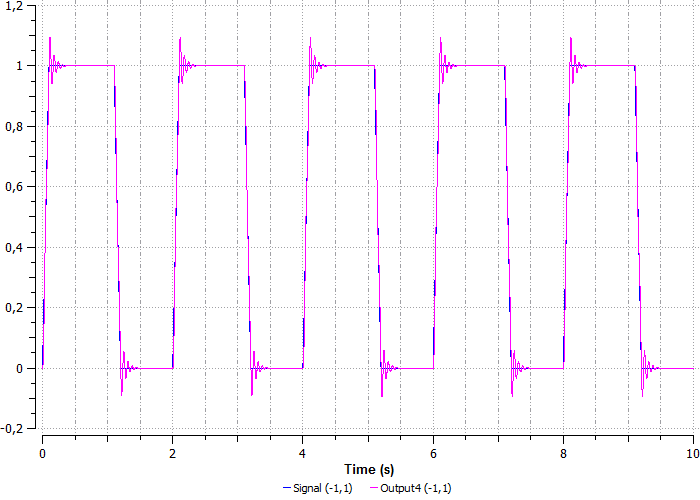
Рисунок 21. График сложной передаточной функции TransferPolynom2nd1
Модели вертикального люфта

Рисунок 22. Модели вертикального люфта
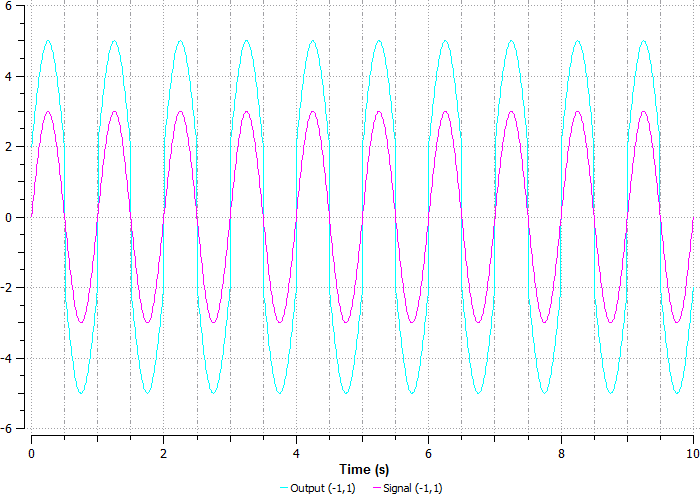
Рисунок 23. График модели вертикального люфта InvDeadBand1
Для модели переменного вертикально люфта заданы параметры VH и VL, которые указывают верхнюю и нижнюю границы (рисунок 24)
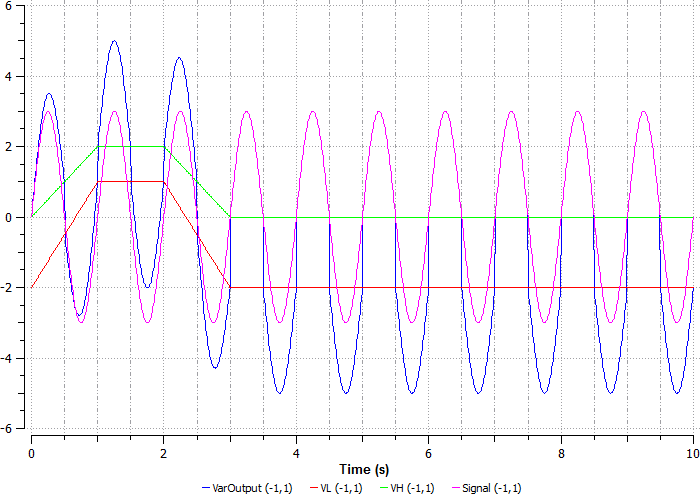
Рисунок 24. График модели переменного вертикального люфта
Модели гистерезиса
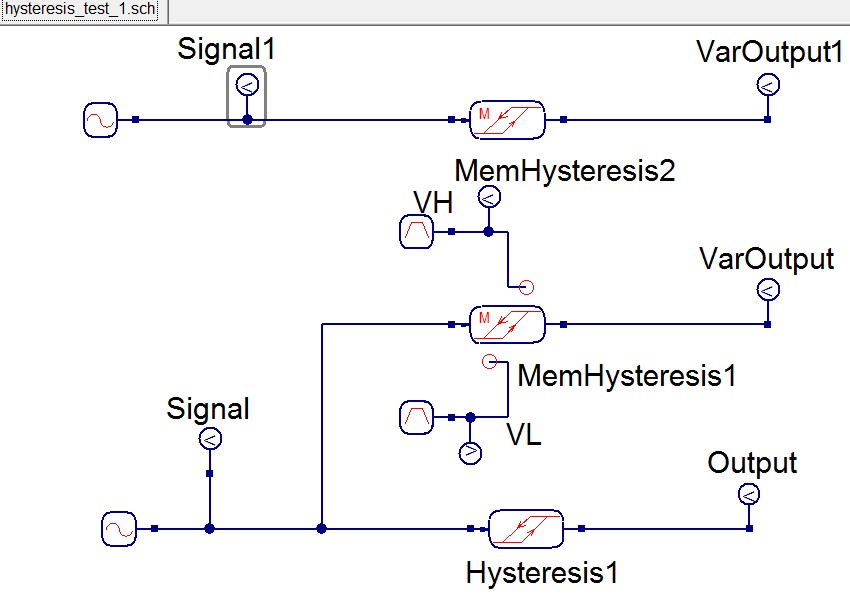
Рисунок 25. Модель гистерезиса
Модель Hysteresis1 преобразует сигнал таким образом, что когда сигнал растет, то он идет по нижнему графику, а когда падает – по верхнему (рисунок 26)
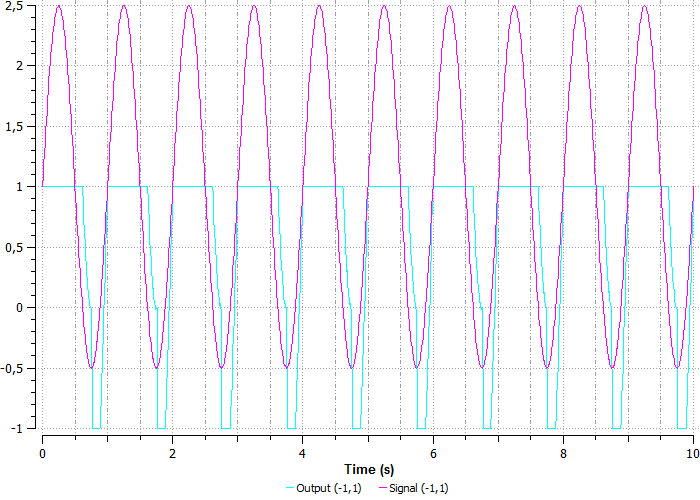
Рисунок 26. График модели гистерезиса Hysteresis1
В модели с памятью MemHysteresis1 запоминается прошлое состояние элемента (рисунок 27, 28):
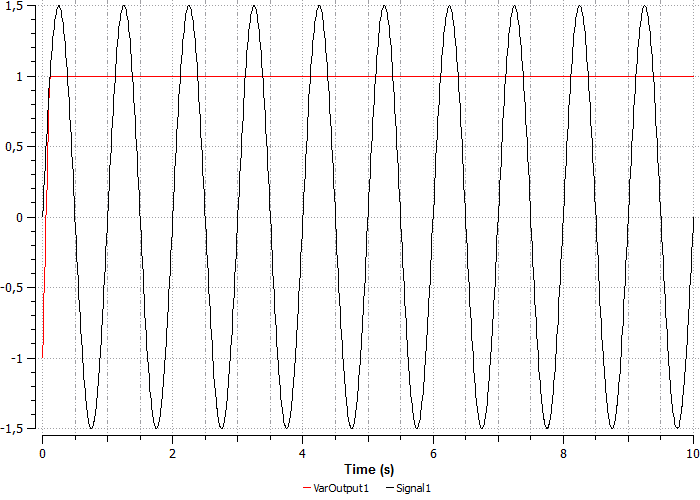
Рисунок 27. График модели гистерезиса с памятью MemHysteresis2
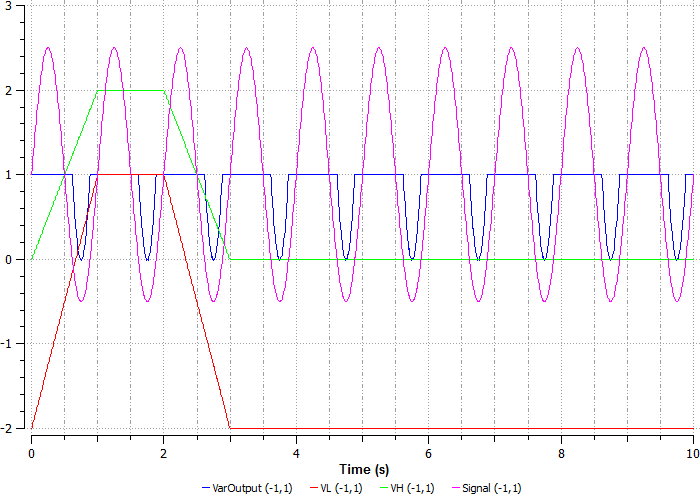
Рисунок 28. График модели гистерезиса с памятью MemHysteresis1
Модели люфта
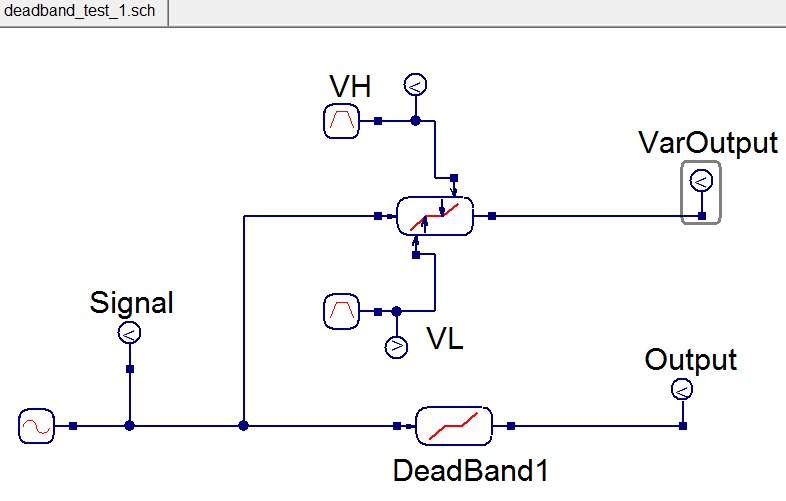
Рисунок 29. Модель люфта
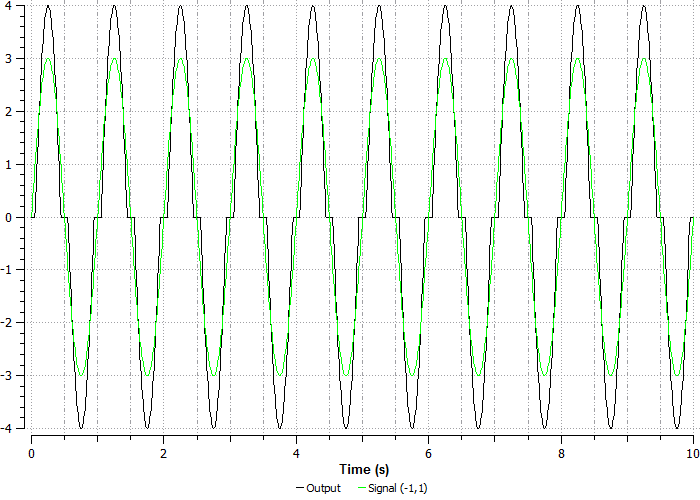
Рисунок 30. График модели люфта DeadBand1
Для модели переменного люфта заданы параметры VH и VL, которые указывают верхнюю и нижнюю границы (рисунок 31)
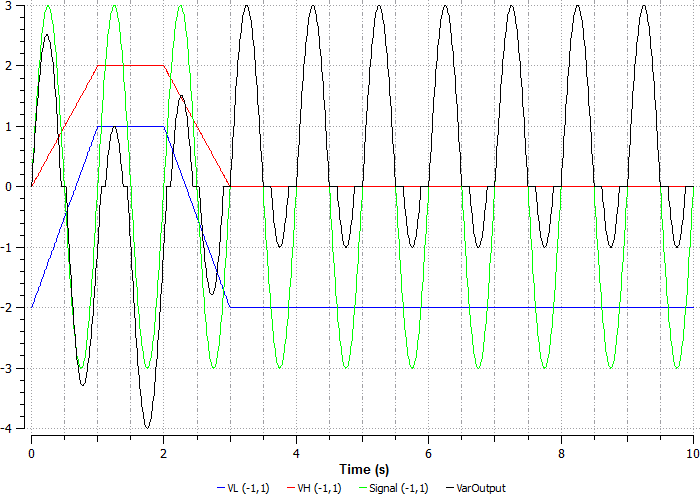
Рисунок 31. График модели переменного люфта